
Oluwaseyi R. Afolayan
Full-Stack Roboticist
Manipulation · Flight Controls · Perception · Autonomy · State Estimation
I build robots that manipulate, navigate, and fly. My work spans real-time Cartesian control on industrial manipulators, full-stack drone autonomy with sim-to-real pipelines, and custom motion planners for collision-free operation. Every project here goes from mathematical foundations through implementation to hardware validation.
Core Competencies
Robotic Manipulation
Jacobian-based Cartesian control, singularity-robust IK, and real-time servo loops on UR5/UR5e platforms.
Flight Controls & GNC
6DOF modeling, successive loop closure, dual EKF state estimation, and full autopilot design for fixed-wing and rotary platforms.
Motion Planning
Sampling-based and optimization-based planners for collision-free trajectory generation in configuration space.
Perception & ML
Computer vision pipelines, ArUco-based precision landing, deep learning for classification, and from-scratch autograd engines.
Embedded & Mechatronics
Sensor integration, real-time embedded control, motor drives, and full electromechanical system design.
Languages & Tools
Portfolio
A curated collection of my research and designs
Real-Time Cartesian Controller for UR5/UR5e
A three-package ROS 2 control framework for real-time end-effector positioning. SVD-based damped ...

Aurelia X4 UAV: Full-Stack Drone Autonomy
Led a team of five to build a complete ROS 2 control system for the Aurelia X4 heavy-lift quadcop...
Bidirectional EST Path Planner for UR5
Custom Bidirectional Expansive Space Tree (BiEST) motion planner integrated with MoveIt 2 for col...
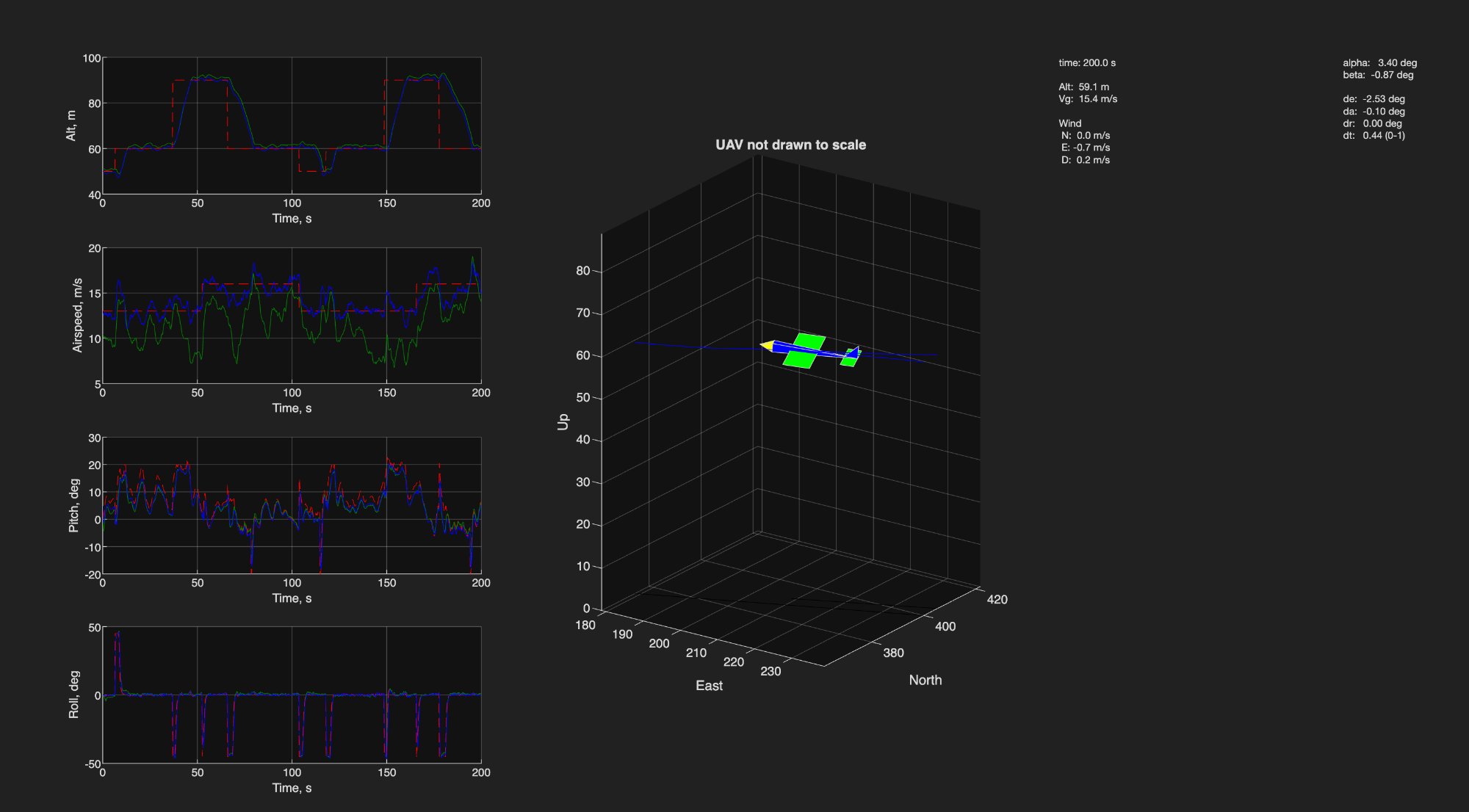
Fixed-Wing UAV Autopilot & State Estimation
Complete fixed-wing UAV autopilot built from first principles. Successive loop closure PID archit...
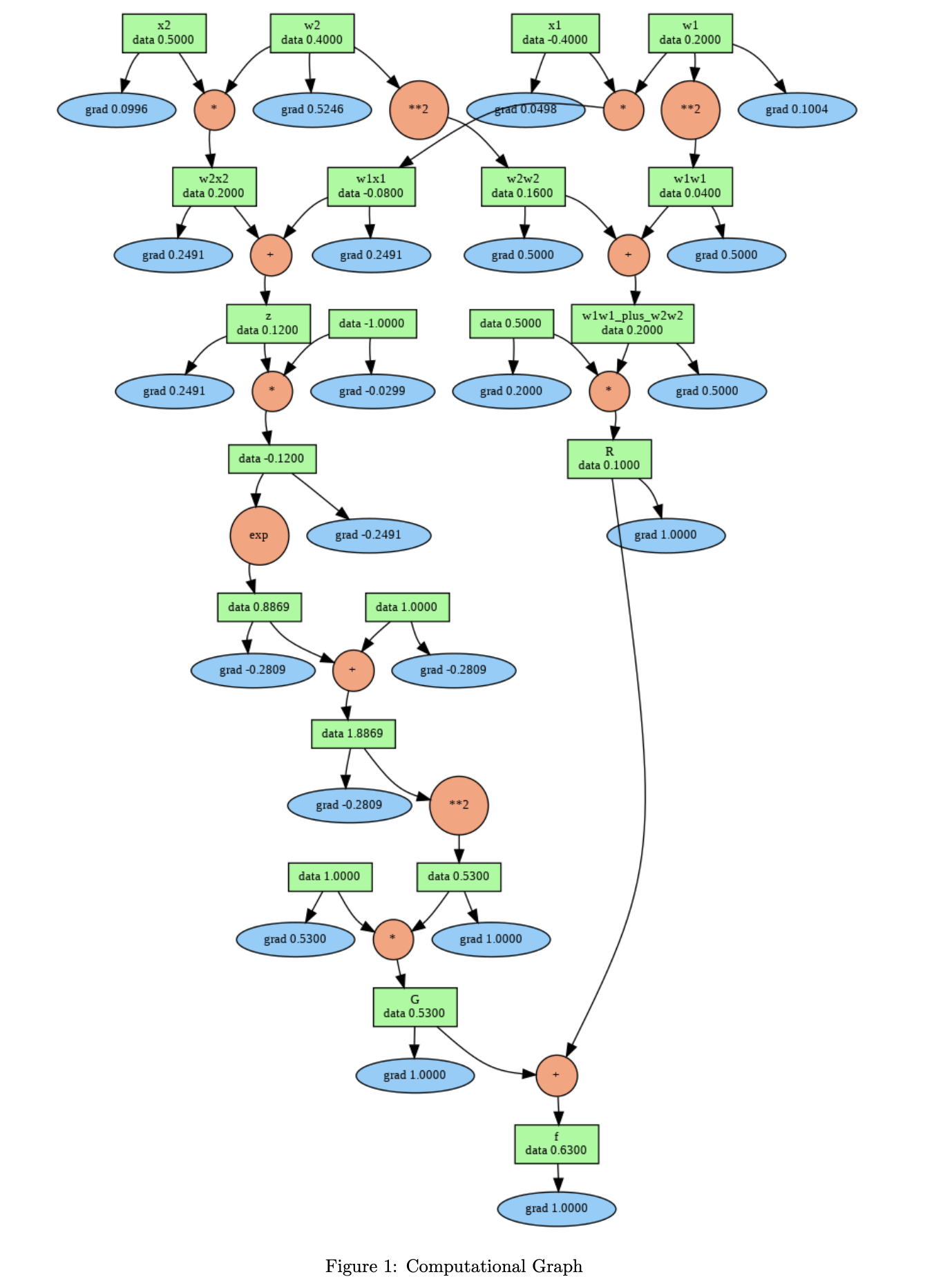
Autograd Engine & Neural Network Classifier
A from-scratch implementation of automatic differentiation and backpropagation, the core engine b...
UR5 Place-and-Draw: Three Control Schemes + Batman
Team project comparing inverse kinematics, resolved-rate differential kinematics, and Jacobian tr...