Real-Time Cartesian Controller for UR5/UR5e
A three-package ROS 2 control framework for real-time end-effector positioning. SVD-based damped pseudo-inverse Jacobian with PID feedback achieving ±0.7mm accuracy at 500Hz on Universal Robots hardware.
Real-Time Cartesian Controller for UR5/UR5e
Overview
A three-package ROS 2 control framework for real-time end-effector positioning. SVD-based damped pseudo-inverse Jacobian with PID feedback achieving ±0.7mm accuracy at 500Hz on Universal Robots hardware.
I built a complete real-time Cartesian position controller for Universal Robots arms from scratch. Not a MoveIt wrapper. Not an off-the-shelf planner. The full pipeline: sensor hardware interface, socket-based data bridge, PID error computation, SVD-based Jacobian inversion, and velocity command generation. Every layer is designed for real-time performance with deterministic timing.
The controller runs at 500Hz and achieves ±0.7mm positional accuracy across the full UR5e workspace. I validated it in Gazebo simulation first, then deployed it on real UR5 and UR5e hardware.
Demos
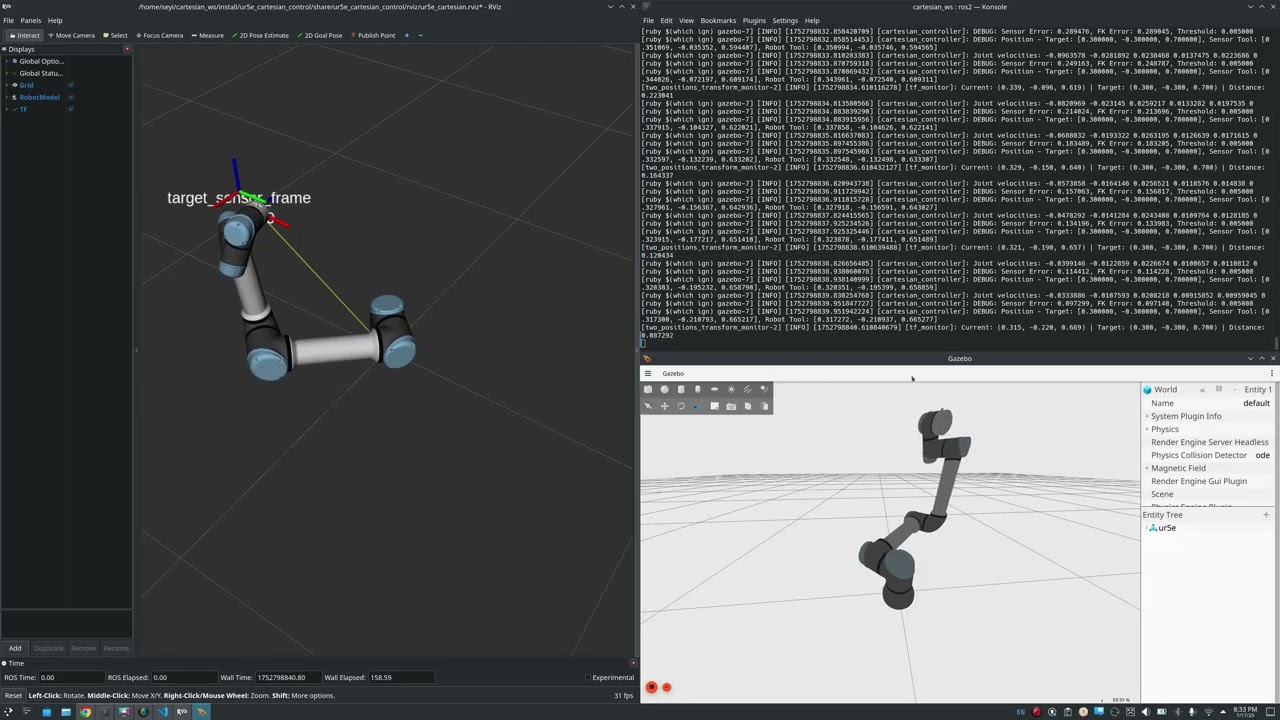
Simulation: UR5e tracking dynamic Cartesian targets in Gazebo with RViz visualization overlay.

Live Demo: Real UR5 robot executing Cartesian position commands on hardware.
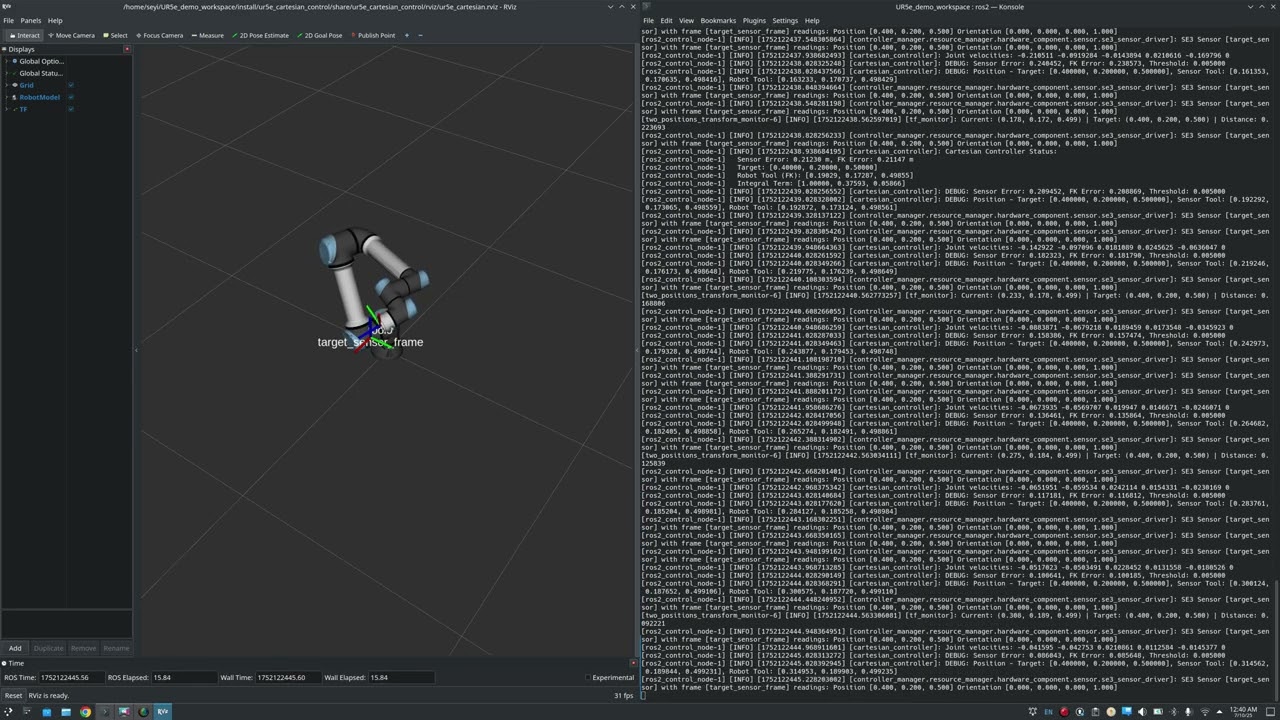
Visualization: TF frames, target tracking, and error convergence in real time.
System Architecture
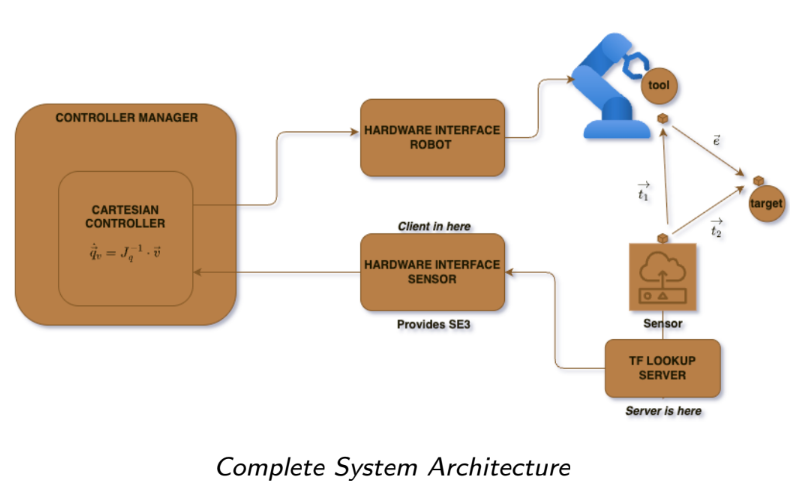
Three ROS 2 packages: se3_sensor_driver (hardware interface reading pose data over TCP), cartesian_controller (PID + Jacobian IK), and ur5e_cartesian_control (launch, config, URDF).
How It Works
Jacobian and Differential Kinematics
The manipulator Jacobian $J(q) \in \mathbb{R}^{6 \times n}$ maps joint velocities to end-effector twist:
\[\begin{bmatrix} \dot{x} \\ \omega \end{bmatrix} = J(q)\,\dot{q}\]where $\dot{x} \in \mathbb{R}^3$ is the linear velocity, $\omega \in \mathbb{R}^3$ is the angular velocity, $q \in \mathbb{R}^n$ is the joint configuration, and $n = 6$ for the UR5e. Since I only control position (not orientation), I extract the top 3 rows to get the position Jacobian:
\[J_p(q) = J(q)_{[1:3,\,:]} \;\in\; \mathbb{R}^{3 \times 6}\]The velocity-level inverse kinematics problem is then:
\[\dot{q} = J_p^{\dagger}\,\dot{x}_{\text{cmd}}\]where $J_p^{\dagger}$ is the pseudo-inverse of $J_p$.
SVD-Based Pseudo-Inverse
The standard Moore-Penrose pseudo-inverse is computed via Singular Value Decomposition. Given $J_p = U \Sigma V^T$, where $U \in \mathbb{R}^{3 \times 3}$, $\Sigma = \text{diag}(\sigma_1, \sigma_2, \sigma_3)$, and $V \in \mathbb{R}^{6 \times 3}$:
\[J_p^{\dagger} = V \Sigma^{-1} U^T\]The problem is that near singular configurations, some $\sigma_i \to 0$, and $\sigma_i^{-1} \to \infty$. This produces unbounded joint velocities that are physically dangerous.
Tikhonov Regularization (Damped Least Squares)
Instead of the standard pseudo-inverse, I use Tikhonov regularization. This replaces the exact inverse with a damped version by adding a regularization term $\lambda$ (the damping factor):
\[J_p^{*} = V \Sigma^{*} U^T\]where each regularized singular value is:
\[\sigma_i^{*} = \frac{\sigma_i}{\sigma_i^2 + \lambda^2}\]This is equivalent to solving the damped least squares problem:
\[\dot{q} = \arg\min_{\dot{q}} \left\| J_p \dot{q} - \dot{x}_{\text{cmd}} \right\|^2 + \lambda^2 \left\| \dot{q} \right\|^2\]The closed-form solution is:
\[\dot{q} = J_p^T \left( J_p J_p^T + \lambda^2 I \right)^{-1} \dot{x}_{\text{cmd}}\]When $\sigma_i \gg \lambda$, the regularized inverse behaves like the standard pseudo-inverse. When $\sigma_i \to 0$, the damping term dominates, and $\sigma_i^{*} \to 0$ smoothly instead of blowing up. In practice, the arm gracefully slows down near singularities instead of generating unbounded joint velocities. I use $\lambda = 0.05$.
PID Control Law
The Cartesian position error drives a full PID controller. Given the current end-effector position $x(t)$ and the target $x_d(t)$, the position error is:
\[e(t) = x_d(t) - x(t) \;\in\; \mathbb{R}^3\]The PID control law computes the commanded Cartesian velocity:
\[\dot{x}_{\text{cmd}}(t) = K_p\, e(t) + K_i \int_0^t e(\tau)\,d\tau + K_d\, \frac{de(t)}{dt}\]where $K_p, K_i, K_d \in \mathbb{R}^{3 \times 3}$ are diagonal gain matrices (one gain per axis). In discrete time with timestep $\Delta t$:
\[\dot{x}_{\text{cmd}}[k] = K_p\, e[k] \;+\; K_i \sum_{j=0}^{k} e[j]\,\Delta t \;+\; K_d\, \frac{e[k] - e[k-1]}{\Delta t}\]Anti-Windup
The integral term can accumulate unbounded error when the robot is physically blocked or the target is unreachable. I clamp the integral per axis:
\[\left| \int e_i(\tau)\,d\tau \right| \leq L_{\text{max}}\]where $L_{\text{max}} = 1.0$ m-s. If the accumulated integral exceeds this bound, it is saturated to $\pm L_{\text{max}}$.
Full Control Pipeline
Combining everything, the complete pipeline at each 500Hz timestep is:
\[e[k] = x_d - x[k]\] \[\dot{x}_{\text{cmd}}[k] = K_p\, e[k] + K_i\, \text{clamp}\!\left(\textstyle\sum e \Delta t\right) + K_d\, \dot{e}[k]\] \[J_p = U \Sigma V^T \quad\text{(KDL Jacobian + SVD)}\] \[\dot{q}_{\text{cmd}} = \alpha \cdot V \Sigma^{*} U^T \, \dot{x}_{\text{cmd}}\]where $\alpha = 0.07$ is the velocity scaling factor that limits maximum joint speeds for safety.
Tuned Parameters
| Parameter | Symbol | Value |
|---|---|---|
| Proportional gain | $K_p$ | diag(2.2, 2.2, 2.2) |
| Integral gain | $K_i$ | diag(0.02, 0.02, 0.02) |
| Derivative gain | $K_d$ | diag(0.5, 0.5, 0.5) |
| Damping factor | $\lambda$ | 0.05 |
| Velocity scaling | $\alpha$ | 0.07 |
| Integral clamp | $L_{\text{max}}$ | 1.0 |
| Control rate | 500 Hz |
Results
| Metric | Value |
|---|---|
| Control loop rate | 500 Hz |
| Position accuracy | ±0.7 mm |
| Convergence time | < 3 sec (50cm moves) |
| Workspace | Full UR5e envelope |
| Singularity behavior | Graceful slowdown via Tikhonov damping |
Links
| View on GitHub | Simulation Demo | Live Demo | RViz Visualization |
Code Files
Damped Pseudo-Inverse Jacobian IK
// SVD-based damped pseudo-inverse Jacobian
// Tikhonov regularization for singularity handling
bool CartesianController::calculateJointVelocities(
const KDL::Twist &cartesian_error,
KDL::JntArray &joint_velocities)
{
KDL::JntArray joint_positions = getCurrentJointPositions();
joint_velocities.resize(joint_positions.rows());
KDL::Jacobian jacobian(joint_positions.rows());
jac_solver_->JntToJac(joint_positions, jacobian);
// Extract position rows of the Jacobian (3x6)
Eigen::MatrixXd jac_position =
jacobian.data.block(0, 0, 3, jacobian.columns());
Eigen::JacobiSVD<Eigen::MatrixXd> svd(
jac_position, Eigen::ComputeThinU | Eigen::ComputeThinV);
// Damped pseudo-inverse: sigma_i / (sigma_i^2 + lambda^2)
Eigen::MatrixXd s_inv = Eigen::MatrixXd::Zero(
svd.matrixV().cols(), svd.matrixU().cols());
Eigen::VectorXd s = svd.singularValues();
for (Eigen::Index i = 0; i < s.size(); ++i)
s_inv(i, i) = s(i) / (s(i)*s(i)
+ damping_factor_*damping_factor_);
Eigen::MatrixXd J_pinv =
svd.matrixV() * s_inv * svd.matrixU().transpose();
Eigen::VectorXd qdot =
velocity_scaling_factor_ * J_pinv * vel;
return true;
}
PID with Anti-Windup
// Full PID control law: u = Kp*e + Ki*integral(e) + Kd*de/dt
KDL::Twist CartesianController::calculateCartesianError(
const KDL::Frame ¤t, const KDL::Frame &target,
const rclcpp::Duration &period)
{
KDL::Vector position_error = target.p - current.p;
double dt = period.seconds();
// Derivative term
KDL::Vector error_derivative = KDL::Vector::Zero();
if (dt > 0.0)
error_derivative = (position_error - last_error) / dt;
last_error = position_error;
// Integral with anti-windup clamping
error_integral = error_integral + position_error * dt;
double integral_limit = 1.0;
for (int i = 0; i < 3; i++) {
if (std::abs(error_integral(i)) > integral_limit)
error_integral(i) = integral_limit
* (error_integral(i) > 0 ? 1.0 : -1.0);
}
// PID output per axis
for (int i = 0; i < 3; i++) {
double control =
position_gain_[i] * position_error(i)
+ ki_[i] * error_integral(i)
+ kd_[i] * error_derivative(i);
// ... apply to twist ...
}
}
SE3 Sensor Hardware Interface
// ros2_control SensorInterface plugin
// Reads SE3 pose data over TCP sockets
hardware_interface::return_type SE3SensorHardware::read(
const rclcpp::Time &, const rclcpp::Duration &)
{
if (!connected_ && !connectToServer())
return hardware_interface::return_type::ERROR;
for (size_t idx = 0; idx < info_.sensors.size(); ++idx)
{
size_t base = idx * 7; // [x y z qx qy qz qw]
uint32_t message_size{0};
::read(sockfd_, &message_size, sizeof(message_size));
rclcpp::SerializedMessage msg(message_size);
// Buffered read with reconnection logic ...
geometry_msgs::msg::PoseStamped pose;
deserialization.deserialize_message(&msg, &pose);
hw_sensor_states_[base + 0] = pose.pose.position.x;
hw_sensor_states_[base + 1] = pose.pose.position.y;
hw_sensor_states_[base + 2] = pose.pose.position.z;
hw_sensor_states_[base + 3] = pose.pose.orientation.x;
hw_sensor_states_[base + 4] = pose.pose.orientation.y;
hw_sensor_states_[base + 5] = pose.pose.orientation.z;
hw_sensor_states_[base + 6] = pose.pose.orientation.w;
}
return hardware_interface::return_type::OK;
}